// The System
Neural World Model Grounded in Real 4D Human Interaction Data
Arcomni builds AXON — a high-consistency neural simulation engine trained on real human interaction. To capture that data at the fidelity we needed, we built AWEAR ourselves. Together they form ASCENT: our full-stack architecture for physical AI.
Get Early Access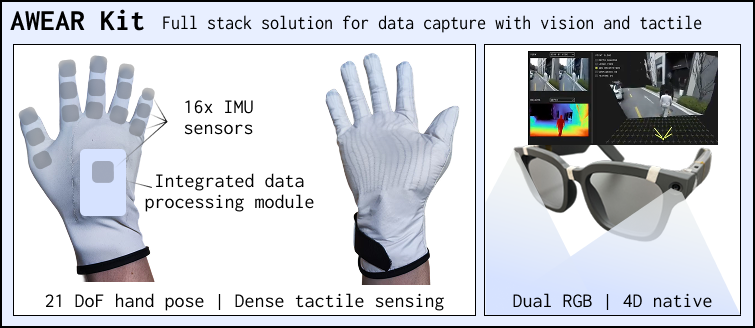
ASCENT
Full-Stack Architecture
The integrated platform connecting data capture, world modelling, and cross-embodiment deployment into one coherent system.
AWEAR
Native 4D Data Acquisition
Hardware we built because it didn't exist. Tactile gloves + smart glasses capturing the richest real-world human interaction data available.
AXON
High-Consistency Neural Simulation
Our neural world model trained on AWEAR data. Closes the sim-to-real gap and transfers human-grounded policies to any robot morphology.
 Gloves
Gloves
 Glasses
Glasses